自動運転技術の発展によりセンサーの小型化や、センサーコストが下がってきました。その中でも、Lidarセンサーは数年前では数百万であった性能の物が数十万までになり、だいぶ身近なものになりました。Lidarセンサーでスラム技術を試してみました。
1.lidarSlamの選定
SLAMアルゴリズムは多数ありますが、今回は香港大学のFAST-LIOを採用することにしました。これは、カルマンフィルタを使用したLidarの特徴点とIMUデータを融合して、計算効率の高い堅牢なナビゲーションを可能にしたものだそうです。
2.FAST-LIO の実行
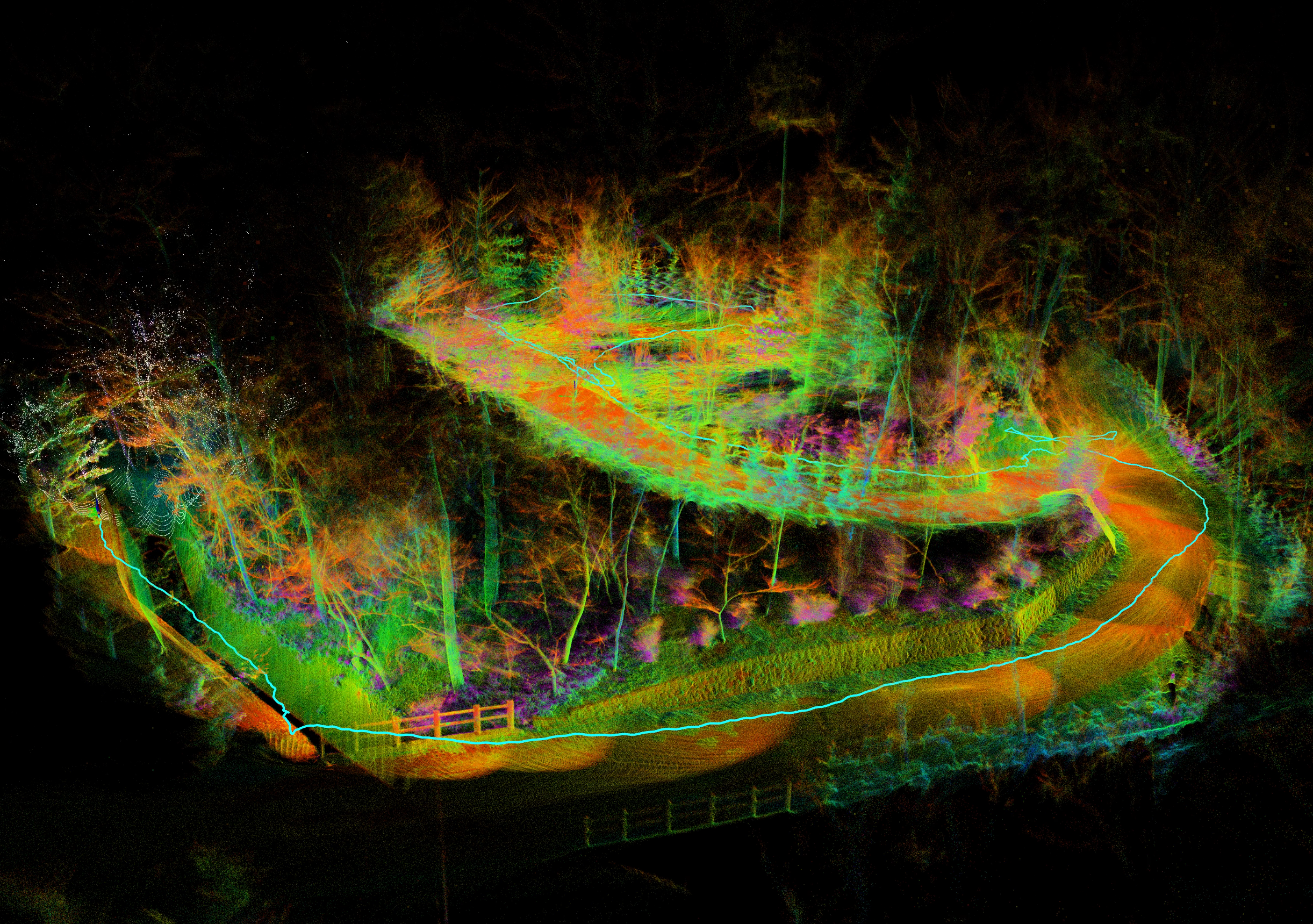
先ずUbuntuにROS環境と必要な依存環境を構築します。SLAMの実行は、リアルタイムでマッピングする方法と後処理でマッピングする方法があります。リアルタイムでは、下図のようにマッピングが実行されていき、点群データが構築されていく様子が見れます。
.gif)
パッケージの特徴上、広く平坦であったり特徴点が少ないところでは、ドリフトといって自己推定位置がずれてしまいます。様々なパッケージが出ており、RTKによりこうした弱点を克服するものだったり、後処理により修正するものなど様々あります。
今回のテストでは、概ね良好な結果が得られているように見られます。驚いたのは概ね300mくらいの周回マップを構築しても、閉じた箇所の誤差がほぼありませんでした。その他のSLAMには、ループクロージャーと言って、閉じた箇所を判定し修正をする機能がはいったものもありますが、今回のFAST-LIOにはありません。それだけ、堅牢な計算システムなのだと思います。もちろんセンサーとIMU、その他環境にもよるかと思いますが驚きです。
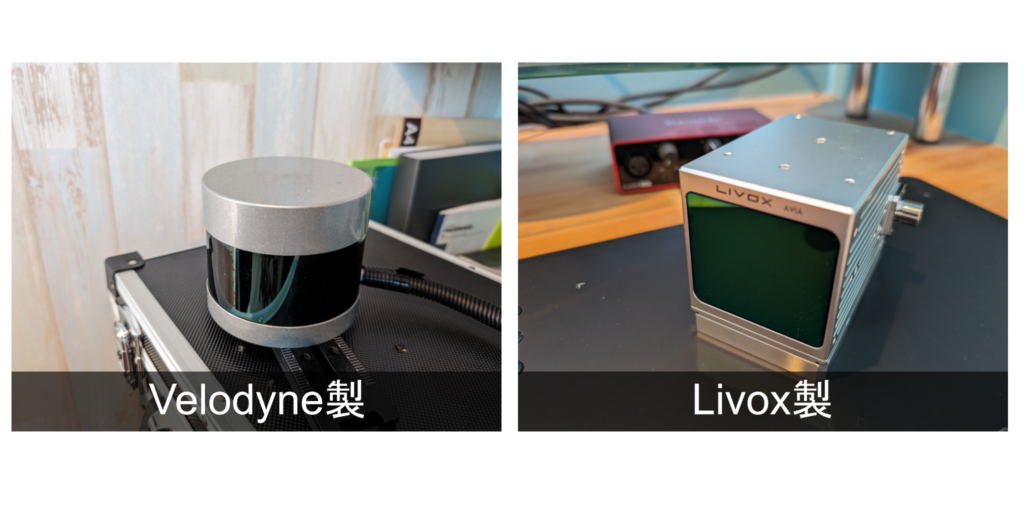
3.使用したLidar
Lidar : Livox製、Verodyne
コメント